New paper "Tactile Memory with Soft Robot (TaMeSo-bot)" presented at CoRL 2025 Workshop on Dexterous Manipulation!
Sep 25, 2025·
 ·
1 min read
·
1 min read
Tatsuya Kamijo
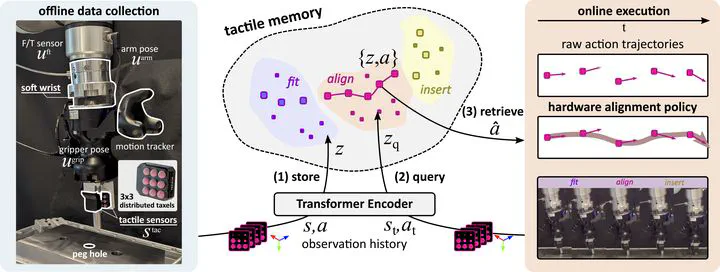
We released our new paper on “Tactile Memory with Soft Robot (TaMeSo-bot)”, presented at CoRL 2025 Workshop on Dexterous Manipulation.
Link to the paper: Tactile Memory with Soft Robot (TaMeSo-bot)